
公司新闻
公司新闻发布时间:2023-12-24 02:39:09来源:开云棋牌
、网络安全和功能安全。然而,大多数工业自动化作为其他所有技术的核心,仍然依靠
运动控制与电机控制经常同时出现,有点让人混淆。这两个概念有啥不一样的区别?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用于这两个概念?欢迎继续阅读,了解运动控制和电机控制的区别以及如何使它们协同工作。
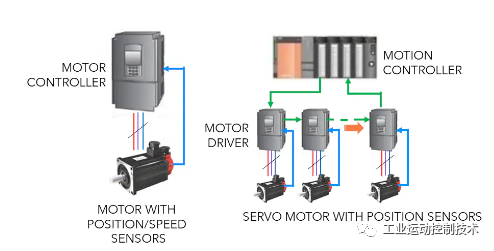
运动控制是工业自动化系统的子系统。它同步化控制多个电机来完成一系列运动。例如,多轴机械臂需要多个电机无缝地协同运行才能做出特定的动作。运动控制大多数都用在轨迹规划、速度规划、插补算法和运动学转换。运动控制管理系统常常会出现在印刷、包装和装配应用中。
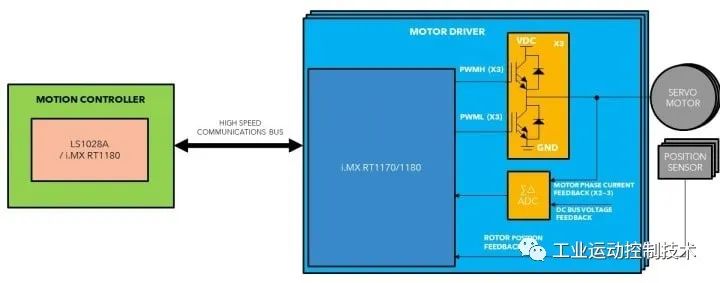
电机驱动器,将运动控制器的控制命令(通常是速度或扭矩信号)转换为更高功率电压或电流信号来驱动电机
位置传感器,将电机转子的位置/速度数据提供给位置/速度控制器,实现精确的位置/速度控制
另一方面,电机控制是更侧重于控制电机旋转的系统或技术。典型的电机控制管理系统调整单个电机的扭矩、速度和位置的一个或多个参数,以达到目标值。电机的类型不同,驱动电机的要求和技术可能会有很大差异。电机控制器通常没有规划能力(高级驱动器只有简单的位置和速度规划能力)。因此,解释电机控制和运动控制区别的简单方法是:
但是,有时我们可能会混淆它们,因为电机控制的位置环/速度环/扭矩环既可以在电机控制器中使用,也可以在运动控制器中使用
现在我们大家都知道了这两个系统之间的差异,显而易见,它们的设计的基本要求及资源也大不相同。
电机控制更侧重于使电机正常旋转,或者更确切地说,是换向。为做到这一点,电机控制器需要与各种传感器对接,处理模拟数字信号,并生成波形来驱动电机。所有这些都发生在非常短的时间环路内,范围从50微秒到300微秒。
然而,运动控制通常充当系统监控器,需要在多个电机控制器之间、通过以太网(EtherCAT和TSN.)、CANRS485的数据等其他来源之间,以及人机界面(HMI)面板的命令之间进行通信。如上所述,运动控制器还可以参与一些电机控制任务,例如控制速度环、位置环,甚至扭矩环。因此,运动控制器的实时控制环路可以从100微秒到数百毫秒不等,具体取决于运动控制器参与的实际任务。
运动控制管理系统的设计可能相当复杂,涵盖了电机控制、工业网络、人机界面、编解码器、信息安全和功能安全等许多方面。因此,它需要多个控制单元在系统中相互协调。
在电机控制器方面,从使用ARMCortex-M0+内核控制简单电机,到使用Cortex-M33内核或高效DSC内核在双电机上运行FOC算法。
如图所示,运动控制系统能使用大量的MCU和MPU来实现多个电机驱动器,促进各个机械臂协同运动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用于这两个概念?
?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用
?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用于这两个概念?
的方式更多齿轮,插补,凸轮等但在IO处理起来就不像有PLC的梯形图那么简单要语言编程。
的方式更多齿轮,插补,凸轮等但在IO处理起来就不像有PLC的梯形图那么简单要语言编程。
复合而成的腰形绕线轨迹数学模型,提出了腰形轨迹两端分别为圆弧、椭圆、劣弧
1、所谓位置环的“环”,不是我们说的PID闭环,位置不能像速度大小、电流的大小那样通过调节器调节; 2、
体的位置可以用编码器也可以直接用位置检测的方法,所以伺服都有直接位置检测信号的输入接口! 3、所谓
卡基于PC总线,是利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服
信号,它均匀地发出脉冲信号,每个脉冲对应一个步距角,进入驱动器后脉冲信号转换成强电流信号,驱动
器的代表行业是风电、光伏、机器人、成型机械等等;PLC则在橡胶、汽车、冶金等行业备受青睐。
交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器
方案,节约宝贵资源,优化产品研究开发。在Trinamic的订制方案中,用户的成功就是Trinamic的成功
实现全闭环,是工控行业的一大难题。主体问题有两个,原点的不确定性和失步,目前,采用高速光电开关作为步进系统的原点,这个误差在毫米级,所以在精确
专业电机制造服务提供商
邮箱:sales@hengdamotor.com
地址:无锡市新吴区城南路218
备案:苏ICP备17020158号-1
 苏公网安备 32021402001542号
苏公网安备 32021402001542号

